



安全を確保するロボット用接触センサの性能評価試験方法
印刷用ページを表示する 更新日:2024年9月1日更新

サービスロボットはQOL(Quality of Life)の向上や労働力の代替として期待されています。しかし人間の近くで稼働するため、人間と接触してケガを負う恐れがあります。ロボットとの危険な接触から回避する方策の一つに「センサによる停止」があります。本稿では、接触式センサの概要を述べ、安全設計上重要となる性能指標について解説します。
ロボット技術グループ TEL. 03-5530-2706
Tweet(外部リンク)
接触センサとは?
接触センサは物体や環境に触れたときの力や圧力を得るための外界センサの1つです[1]。接触センサは様々な原理により動作し、安全用途の機能として少なくとも接触の有無を検知できればよく、ロボットの停止にはオンオフ信号を出力する簡便なセンサが用いられます。近年では図1のような人間への危害を低減するための緩衝効果も付与されているものもあります。
様々な接触センサが提案されている中で、理想の接触センサとは?と疑問を抱くことがあるでしょう。それは「人間が触れた瞬間」に反応し、衝撃力を和らげることができる接触センサです。すなわち、人間がセンサ表面に触れた瞬間からセンサが停止信号を発するまでの「応答時間」とその間にロボットが移動した距離に基づく「接触力」を、それぞれ定量的に評価して、センサの良し悪しを判断することになります。
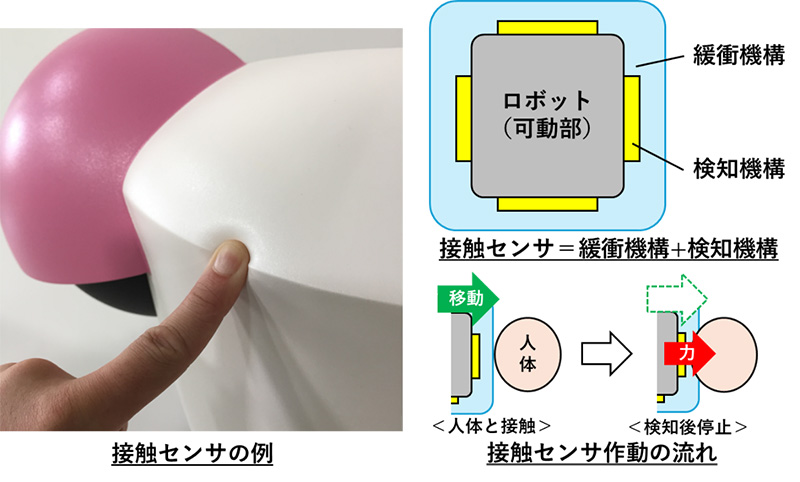
図1 接触センサの例と概要
接触センサの性能を評価するための規格
従来、安全規格ISO13856シリーズに規定されている接触センサは産業機械等に広く適用されています。このほかAGV(Automated Guided Vehicle)や移動ロボットにはバンパーセンサという名称で接触センサが搭載されています。このバンパーセンサについてもISO13856-3[2]では検知性能を測ることが要求されています。具体的には、バンパーセンサが人体に接触する部位を想定した治具を押し当てていき、押し込み量と接触力の関係そしてバンパーセンサが作動する押し込み量を測定するものです。
しかし、従来手法では、「人間がセンサに触れた瞬間」といった時間的な性能評価ができません。そこで2023年に制定されたJIS B8451-1[3]では、図2の左図に示すように接触センサの表面に触れたことを検知する仕組みを追加し、センサに触れた瞬間の信号とセンサが出力した瞬間の信号の時間的な差分を「応答時間」と定義し、新たな評価項目として規定されました。
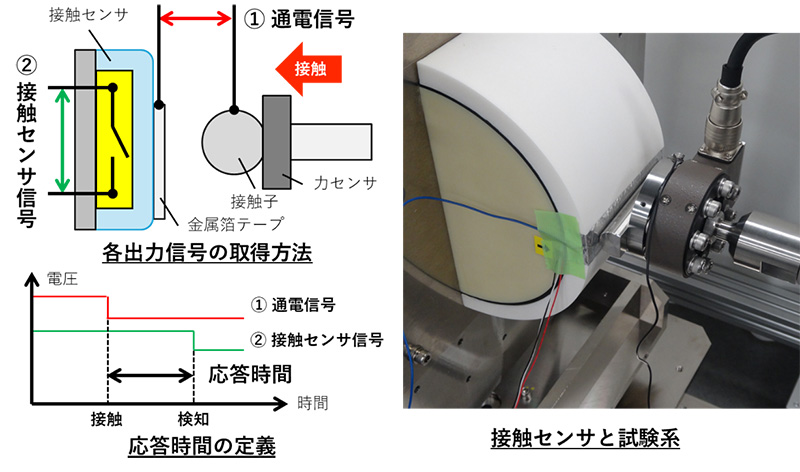
図2 接触センサの応答時間測定原理と試験系の例
接触センサの性能に基づいた安全設計への応用
この規格は誰でも簡単に測定できることを念頭に開発されており、専門機関だけが実施可能というものではありません。また単に接触センサの良し悪しを判断するためだけのものでもありません。最終的な目的である「人間に危害を与えないようにするための安全なロボットを作るため」に必要な接触センサの性能情報を得るためのものです。
サービスロボットや協働ロボットの安全規格[4][5]では人間の痛みを感じるレベルの接触は許容するという考えのもと、人間の耐性値が規定されています。これは接触力の上限値と言うことができ、接触力は図3に示すようにロボットの表面剛性と制動距離の関係から見積もることができます。また、制動距離はロボットの停止性能とセンサの応答時間の関係によって定まります。この2つの関係は連動しており、ロボットの停止性能が分かれば、接触力のコントロールが可能になります。
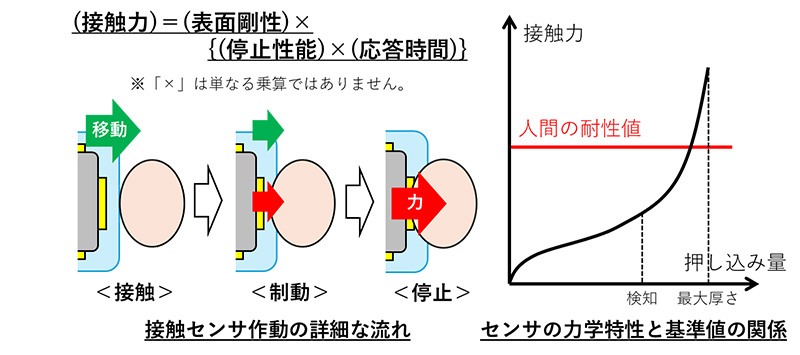
図3 性能評価結果から安全設計への応用
接触センサの性能評価方法には、これまで述べたように安全なロボットを作るための意図が込められています。
参考文献
[1] 下条: “これからの触覚技術”, 日本ロボット学会誌, Vol.37, No.5, pp.385-390, 2019, DOI:10.7210/jrsj.37.385.
[2] ISO 13856-3:2013 Safety of machinery -- Pressure-sensitive protective devices -- Part 3: General principles for design and testing of pressure-sensitive bumpers, plates, wires and similar devices
[3] JIS B 8451-1:2023 サービスロボットの性能試験方法―第1部:衝撃吸収型接触検知外装カバー
[4] ISO/TR 23482-1:2020 Robotics -- Application of ISO 13482 -- Part 1: Safety-related test methods
[5] ISO/TS 15066:2016 Robots and robotic devices -- Collaborative robots
Tweet(外部リンク)
関連情報
- サービスロボットの周囲への接触を検知するカバーについて、その性能試験方法に関するJISを制定しました(外部リンク) (閲覧日2024年8月1日)


※記事中の情報は掲載当時のものとなります。
![]() (外部リンク)
(外部リンク)
PDF形式のファイルをご覧いただく場合には、Adobe社が提供するAdobe Readerが必要です。
Adobe Readerをお持ちでない方は、バナーのリンク先からダウンロードしてください。(無料)